L’entreprise MansaThau nous a confié le développement d’une solution pour simplifier et sécuriser les opérations de mouillage de son catamaran de promenade basé à Mèze.
Le mouillage:
Manœuvre: Le mouillage est la manœuvre consistant à mouiller c’est-à-dire à poser l’ancre dans un mouillage. (d’après Wikipédia)

Le guindeau: C’est une sorte de treuil adapté à la chaine de la ligne de mouillage. A droite: le barbotin qui agit sur la chaine. A gauche la poupée du winch que nous utiliserons pour détecter la rotation.
Le projet:
L’objectif de MansaChaine est de permettre de connaitre la longueur de chaine filée et d’éviter de dépasser la fin de celle-ci.
Un cahier des charges a été établi.
L’équipe:
Le développement du projet a été confié à:
Alexis 
et
Alexandre ![]()
Architecture du système:
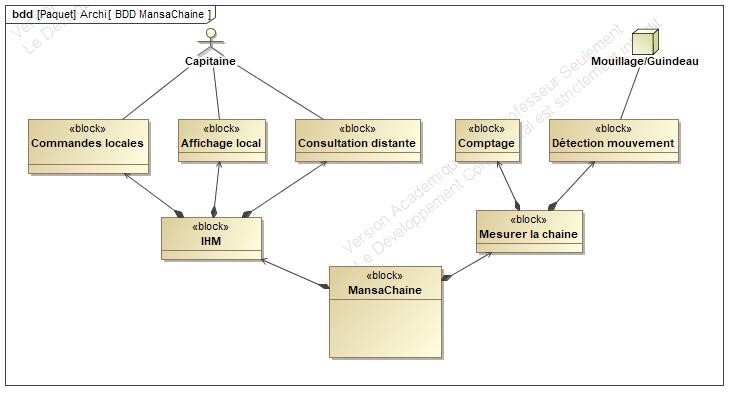
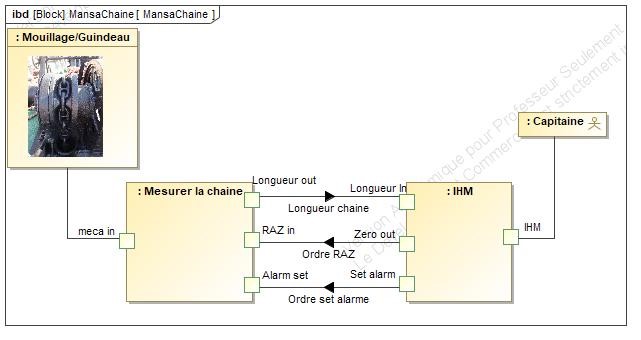
Structure:
Le microcontrôleur:
Le système a été organisé autour d’un ESP32 en module WROOM.
Vous connaissez certainement l’ESP32.
Il a été choisi en raison des caractéristiques suivantes:

- Il est puissant (32bits, ~200MHz).
- Il intègre le BlueTooth.
- Il n’est pas cher.
- La chaine de développement est gratuite.
- Il est soutenu par une communauté riche.
- On l’a déjà utilisé.
La détection de mouvement du guindeau:
C’est Alexandre qui s’est occupé de cette partie.
Le guindeau existant: 
Parmi les solutions possibles pour détecter la rotation du guindeau il a été décidé de construire un codeur incrémental mettant en œuvre des aimants et des capteurs à effet hall.
Cette solution est simple à rendre étanche et est peu perturbée par le milieu marin (eau salée, vase, algues, sable…).
Le prototypage du codeur:


La détection:
Elle est basée sur l’utilisation de deux capteurs à effet hall placés cote à cote qui permettront de générer les signaux en quadrature du codeur incrémental.
Les capteurs à effet hall:
Ce sont des A3144 à sortie logique à drain ouvert qui peuvent être alimentés entre 4.5 et 24 volts.
L’affichage local:
C’est Alexis qui s’occupe de cette partie.
La technologie d’affichage retenue, en réponse au cahier des charge, a été la technologie 7 segments à led:
- adaptée aux ambiances fortement éclairées
- adaptable aux faibles éclairements
- existe en toutes tailles
- consommation supérieure au LCD (par exemple) mais compatible avec l’alimentation du bateau
Un petit tour dans la cabine de MansaThau a permis de repérer un emplacement de bonnes dimensions (plus grand que ce qui est spécifié dans le cahier des charges) qui venait de se libérer sur le tableau de bord. Après consultation du maître d’ouvrage, la décision a été prise de s’adapter à ces dimensions ce qui a permis d’intégrer des afficheurs de 25mm.
La solution d’Alexis:
Elle associe des afficheurs 7 segments à leds rouges de forte luminosité à des registres à décalage en cascade.
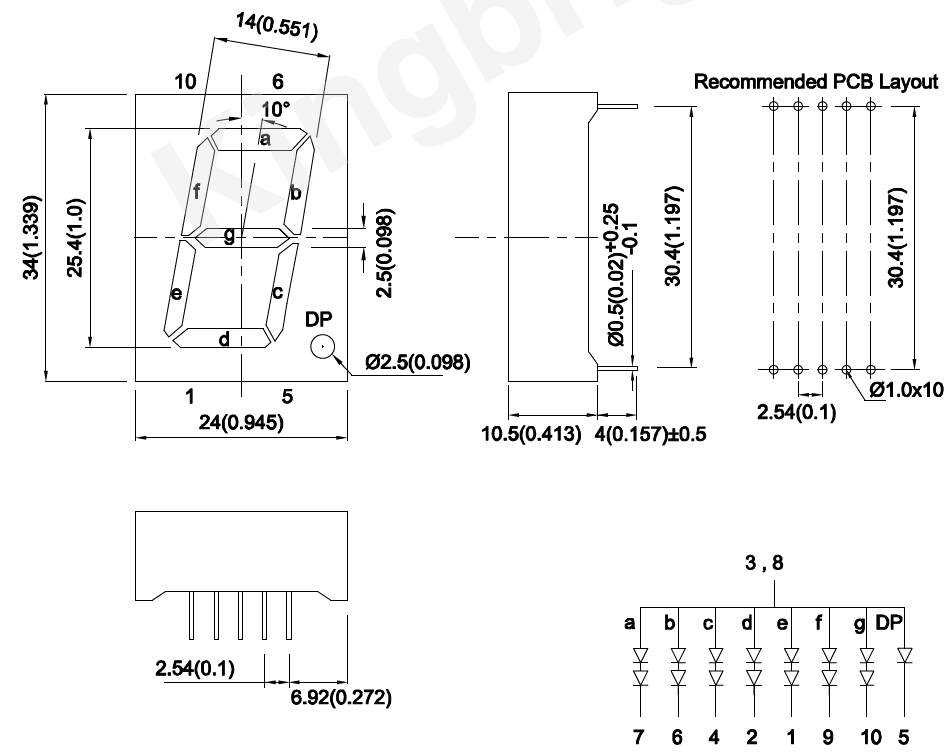
Afficheur:
Ce sont des SA10-21SURKWA Kingbright à anode commune qui émettent 260000µcd @10ma.
Registre à décalage:
Ce sont des STP08CP05 en boitier SOIC16. Il pilotent huit sorties à drain ouvert qui supportent jusqu’à 20V et 100mA. Ils intègrent un générateur de courant réglable.
Interfaçage:
Il est apparu que les registres à décalage pouvaient être pilotés comme des esclave SPI en écriture seule. Le contrôleur SPI de l’ESP32 a donc été utilisé.
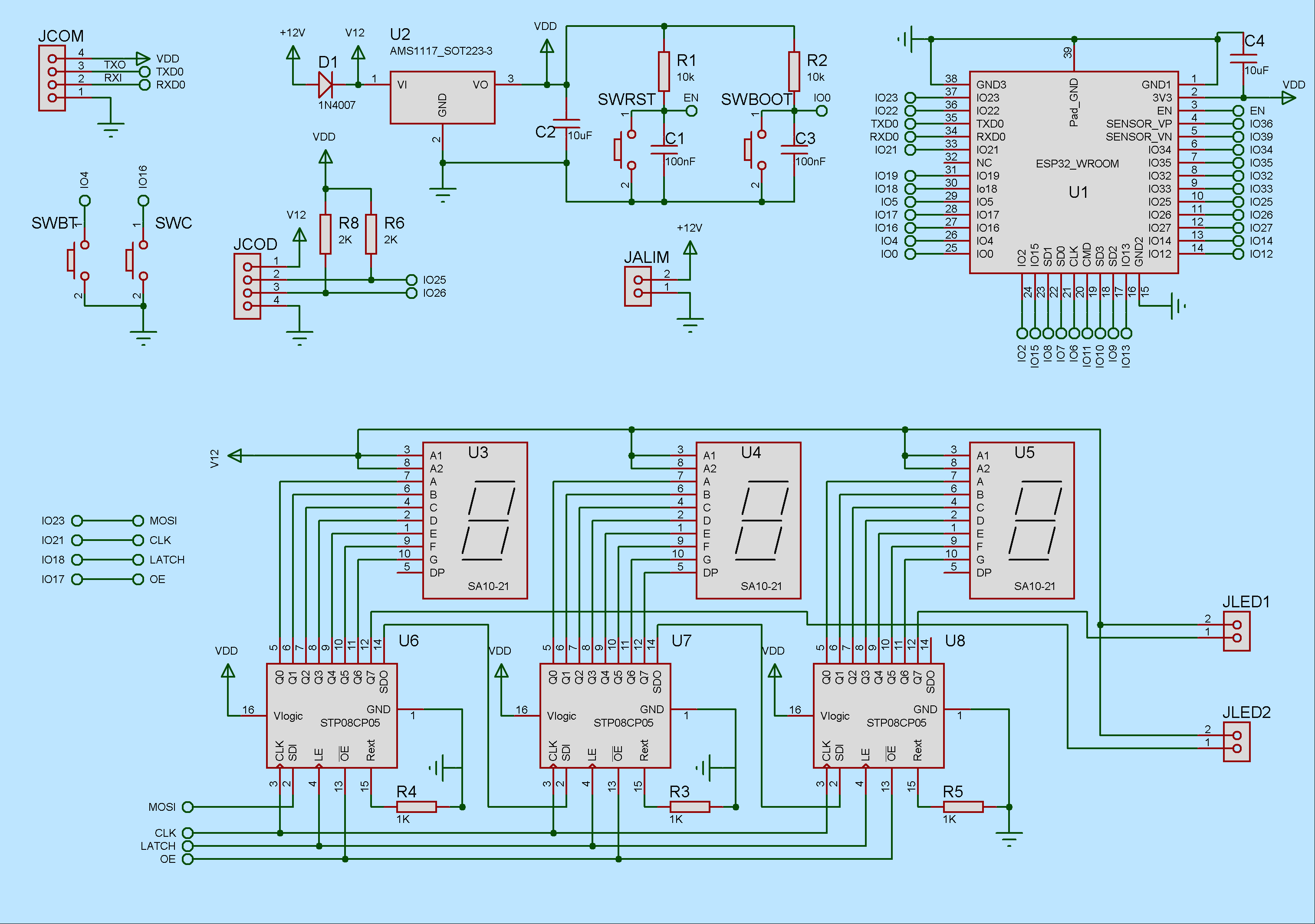
Le schéma:
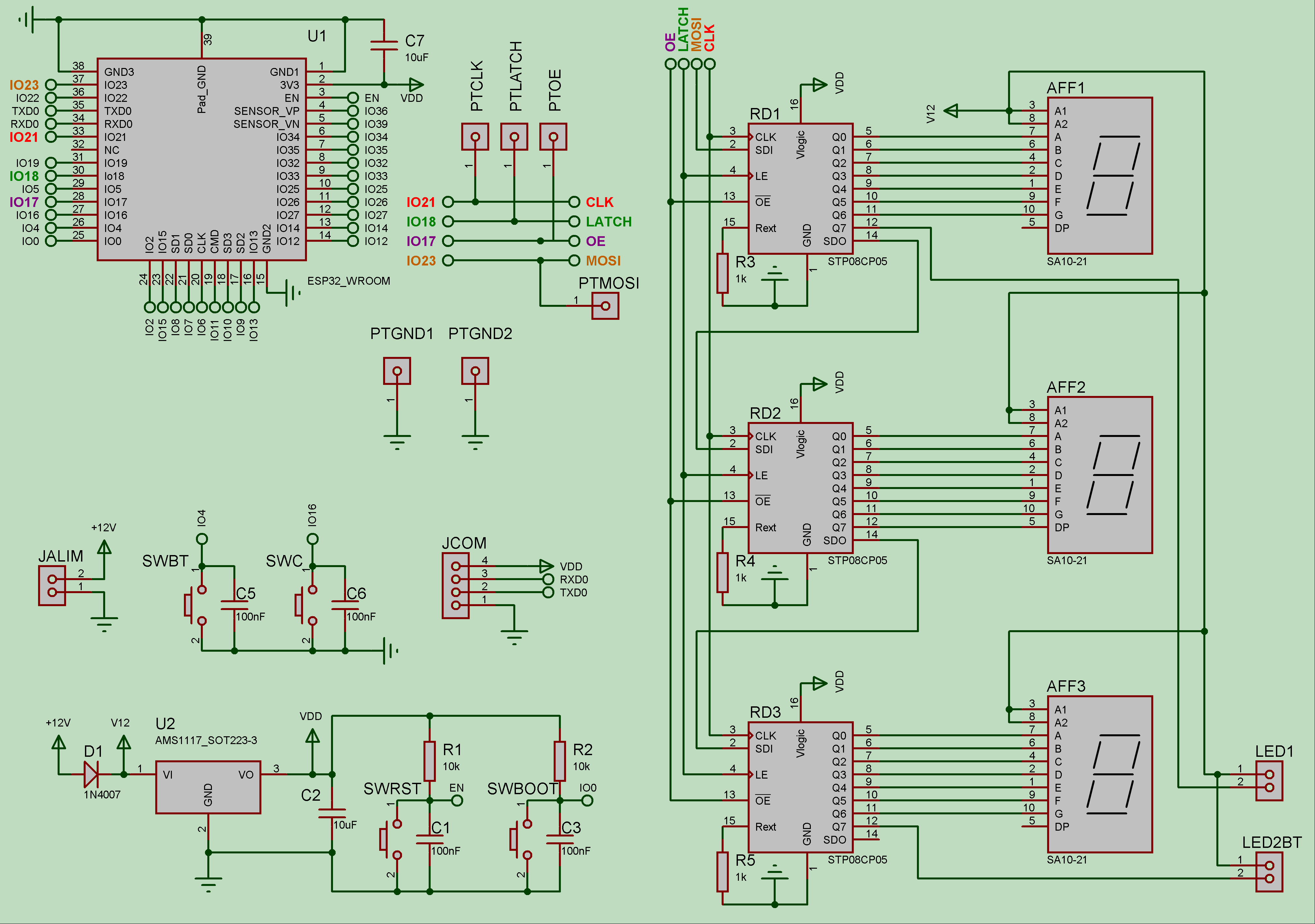
Il a été décidé de n’utiliser que le deuxième point décimal ce qui permet d’afficher des mesures avec une précision de 0.1m. Les deux sorties ainsi libérées ont été utilisées pour piloter des leds associées aux boutons poussoirs. Sur l’ESP32 le SPI peut être routé sur les GPIO de notre choix.
Pour faire varier la luminosité, le signal OE, qui permet de faire commuter les sorties, a été associé à un des canaux PWM dédiés à cet usage de l’ESP32.
En entrée, des boutons-poussoirs étanches à Led intégrée ont été sélectionnés.
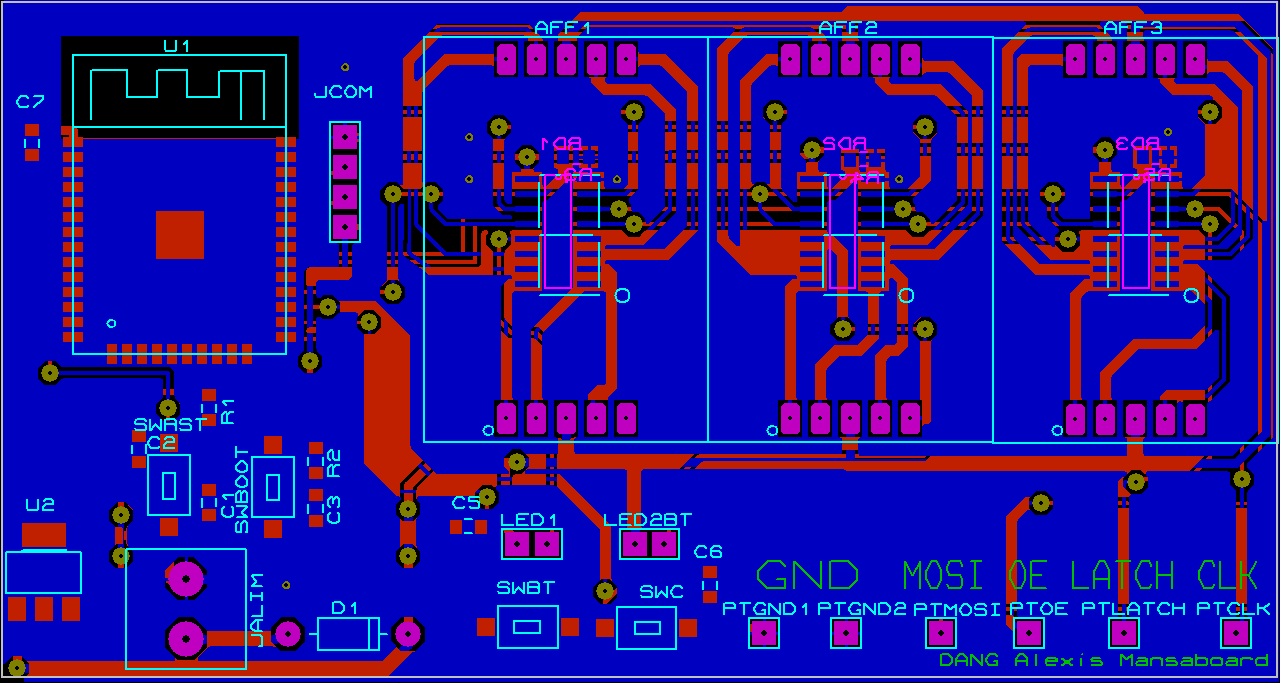
La carte d’Alexis:
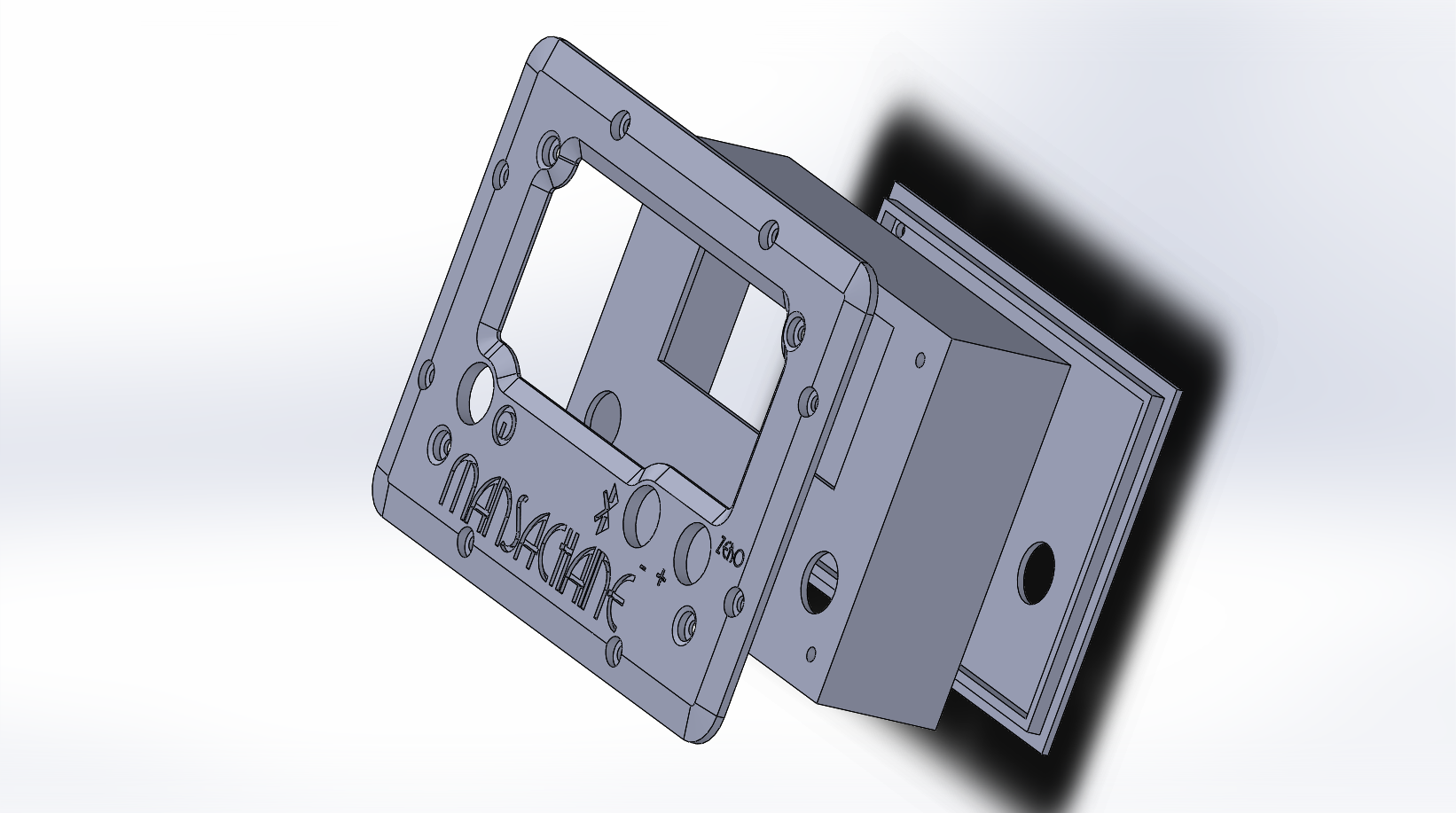
Le boitier:
Un petit tour sous Solidworks et à l’imprimante:
Le schéma final:
Il intègre les solutions d’Alexis et Alexandre.
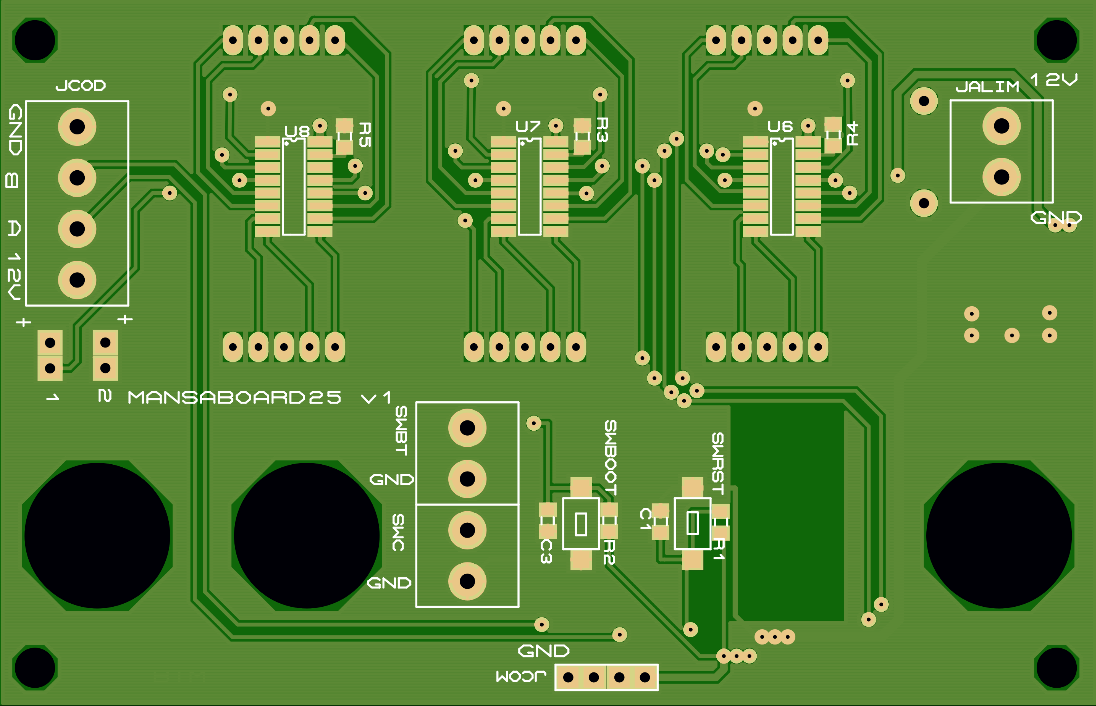
La carte finale:
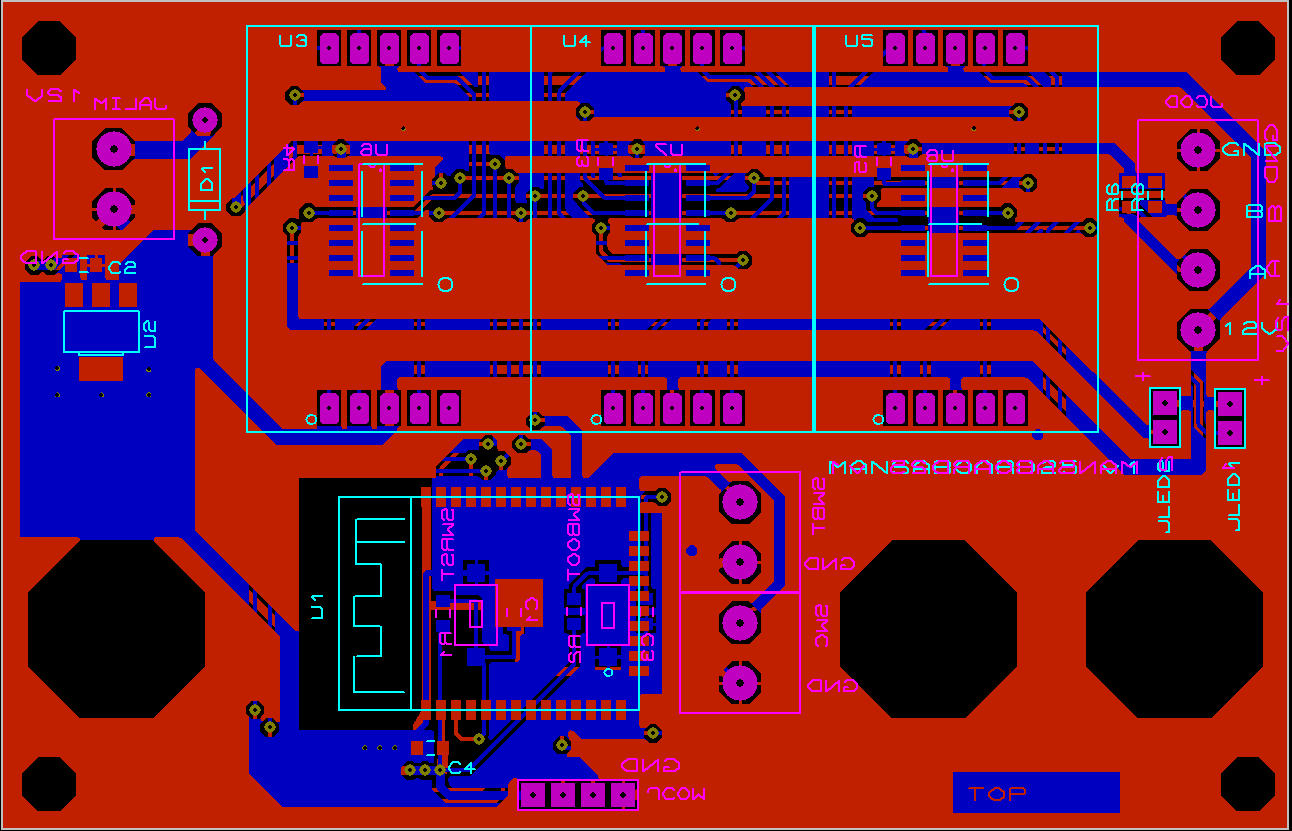
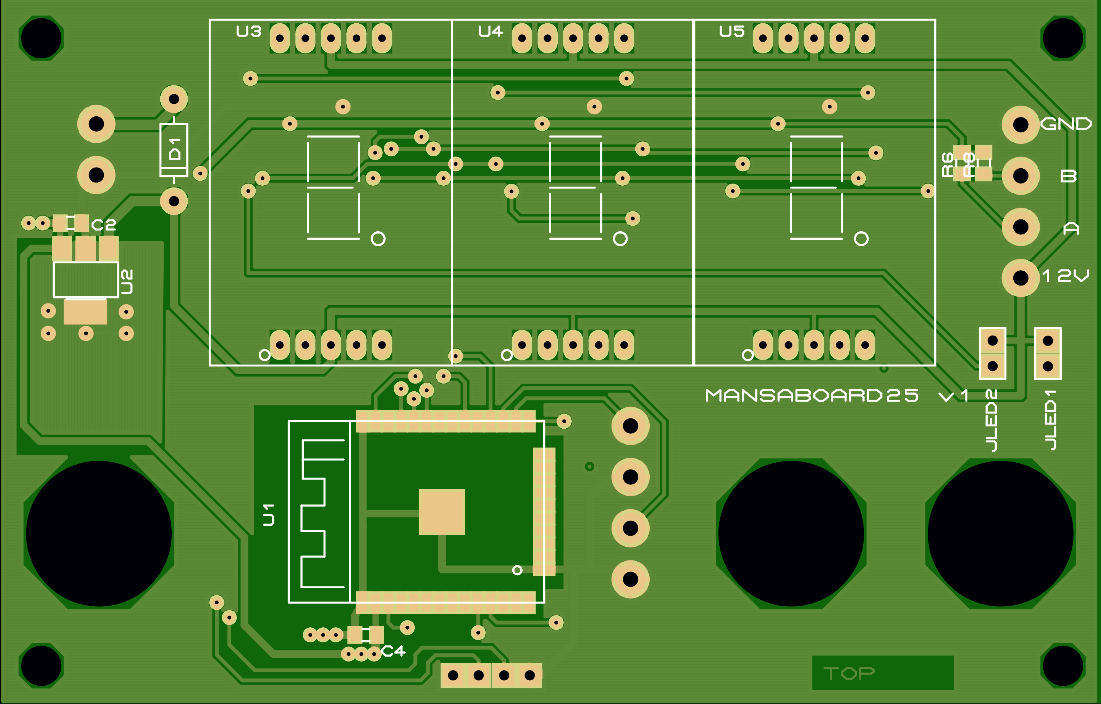
Elle est adaptée aux dimensions du boitier.
L’ESP32 est placé dessus avec les afficheurs. 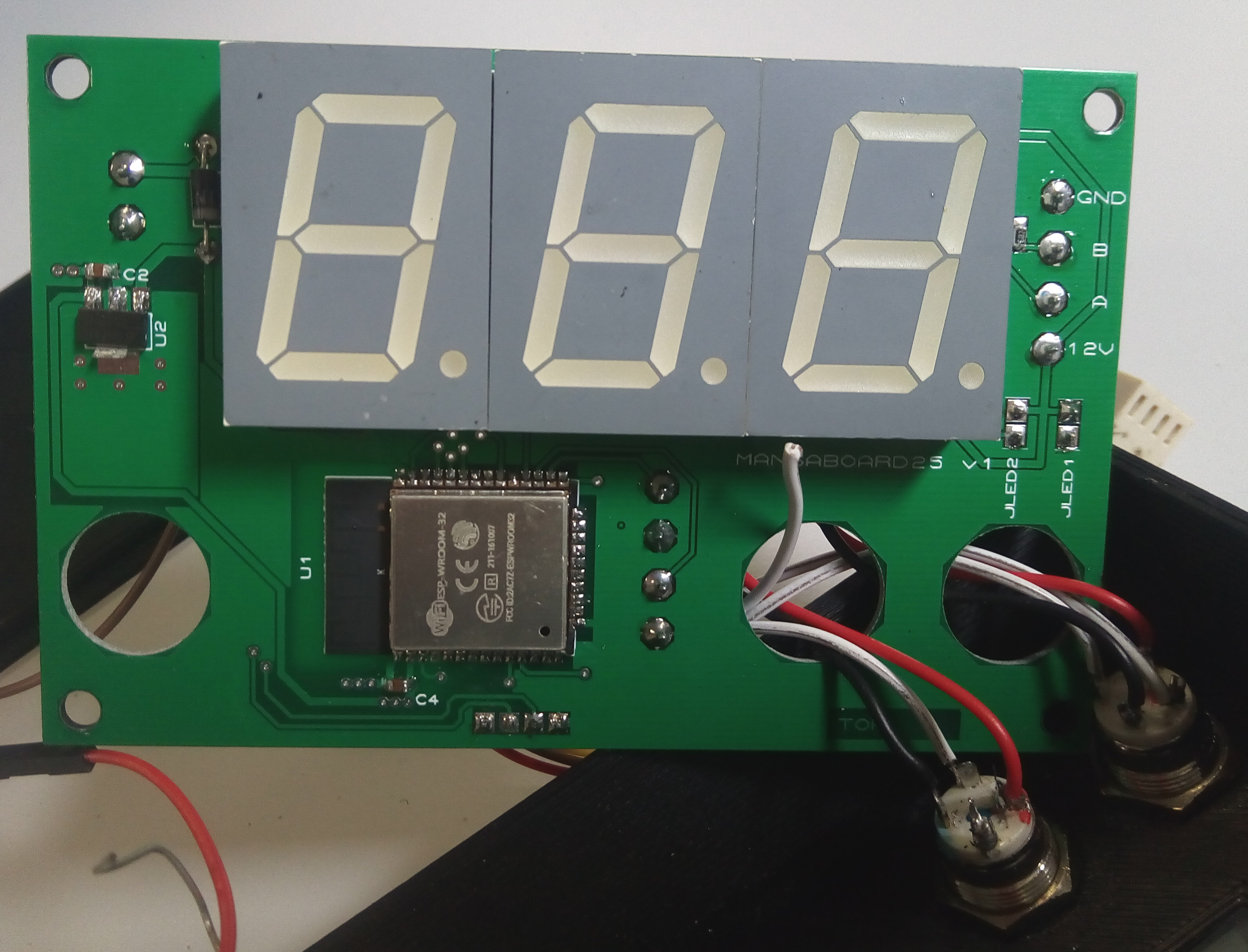
Les drivers, borniers et autres sont dessous. 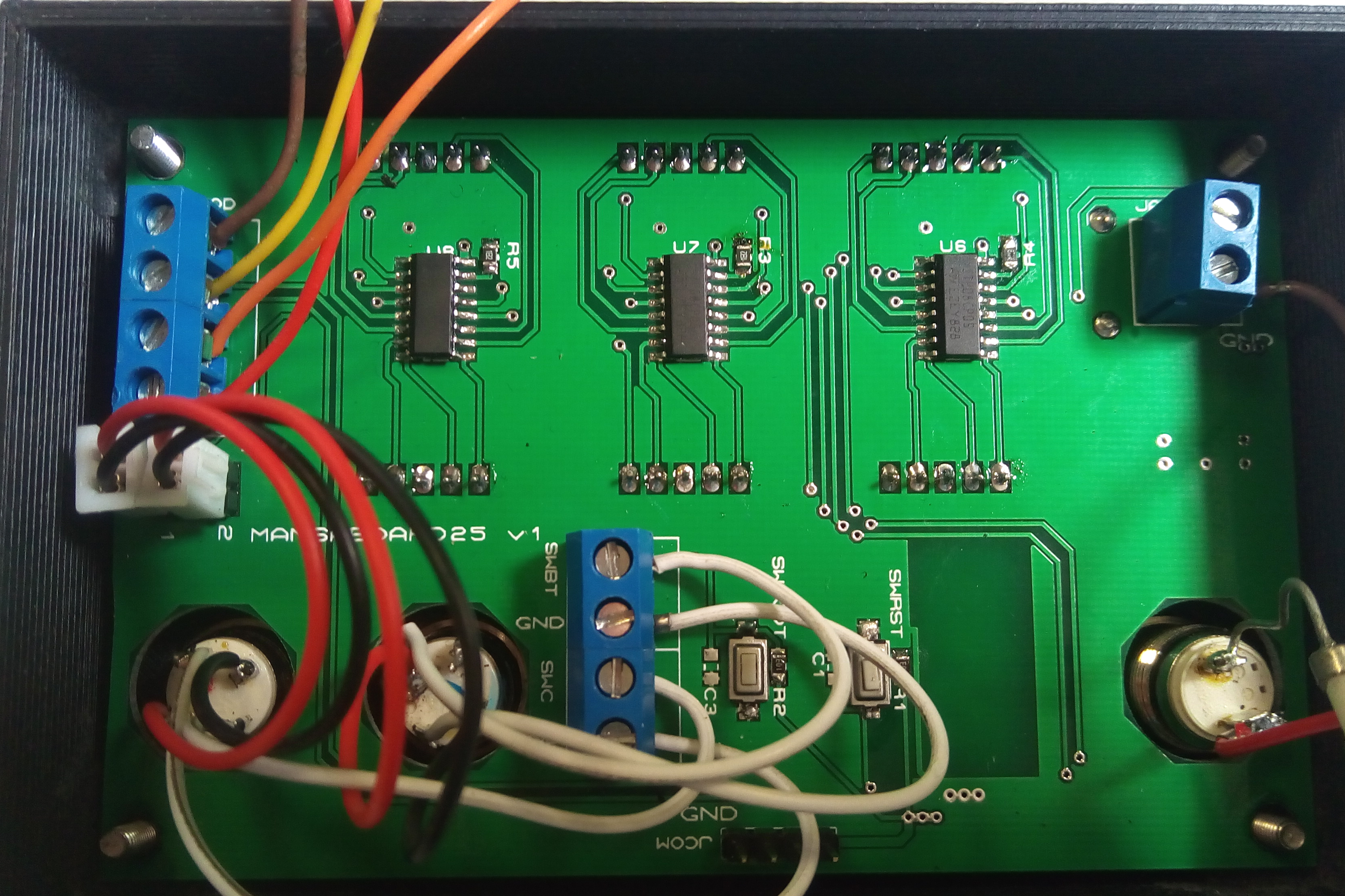
Installation à bord
Installation du codeur sur le guindeau
La carte capteurs à effet hall est isolée dans de la résine époxy et installée dans un support qui sera collé entre le châssis et la poupée du winch qui intègre le porte-aimants:
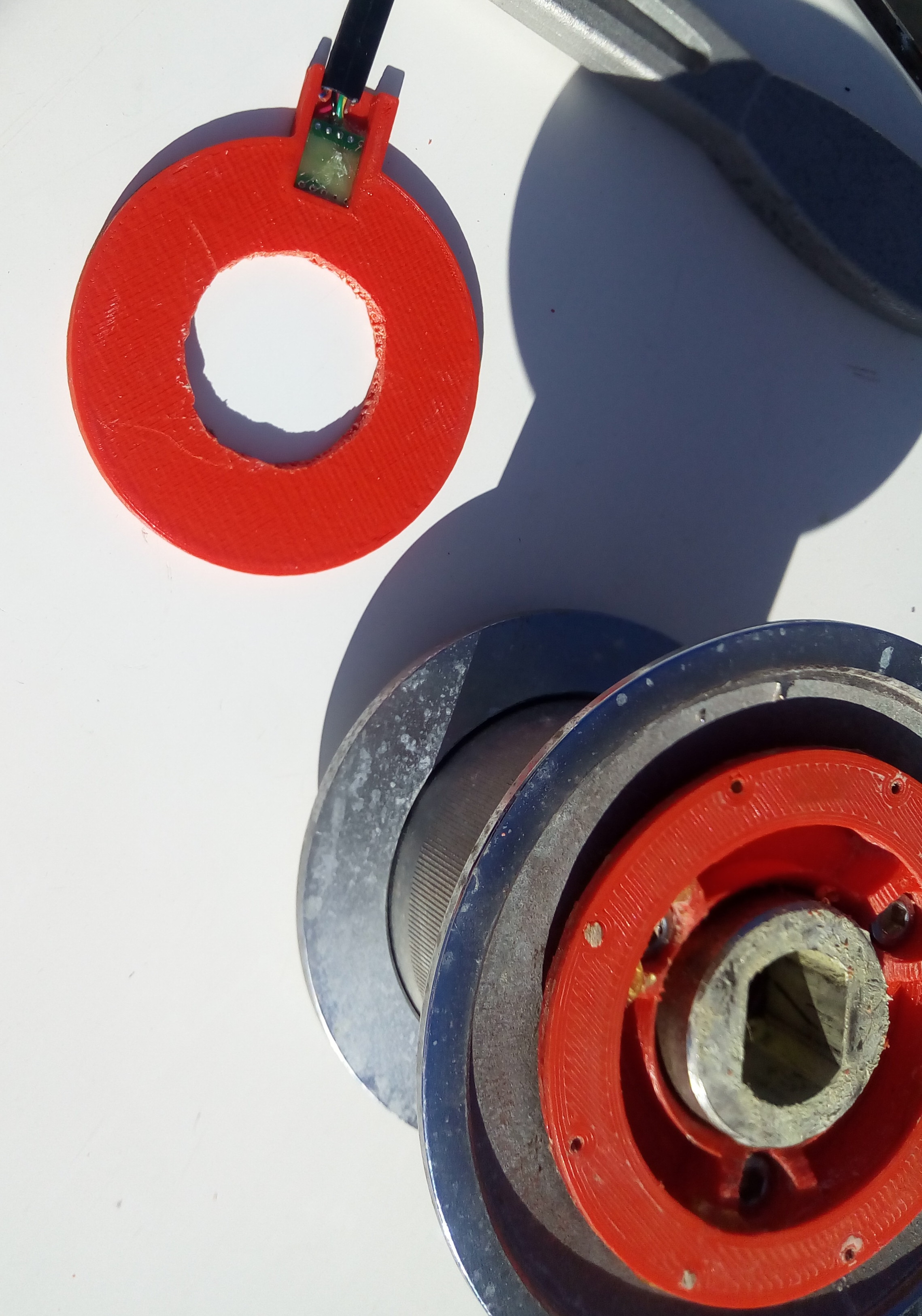
Les capteurs sont fixés entre le bâti et le winch.

Le codeur est en place. Le câble est protégé sous l’adhésif armé gris.

Installation de l’afficheur au poste de pilotage
L’afficheur câblé et prêt à être installé.
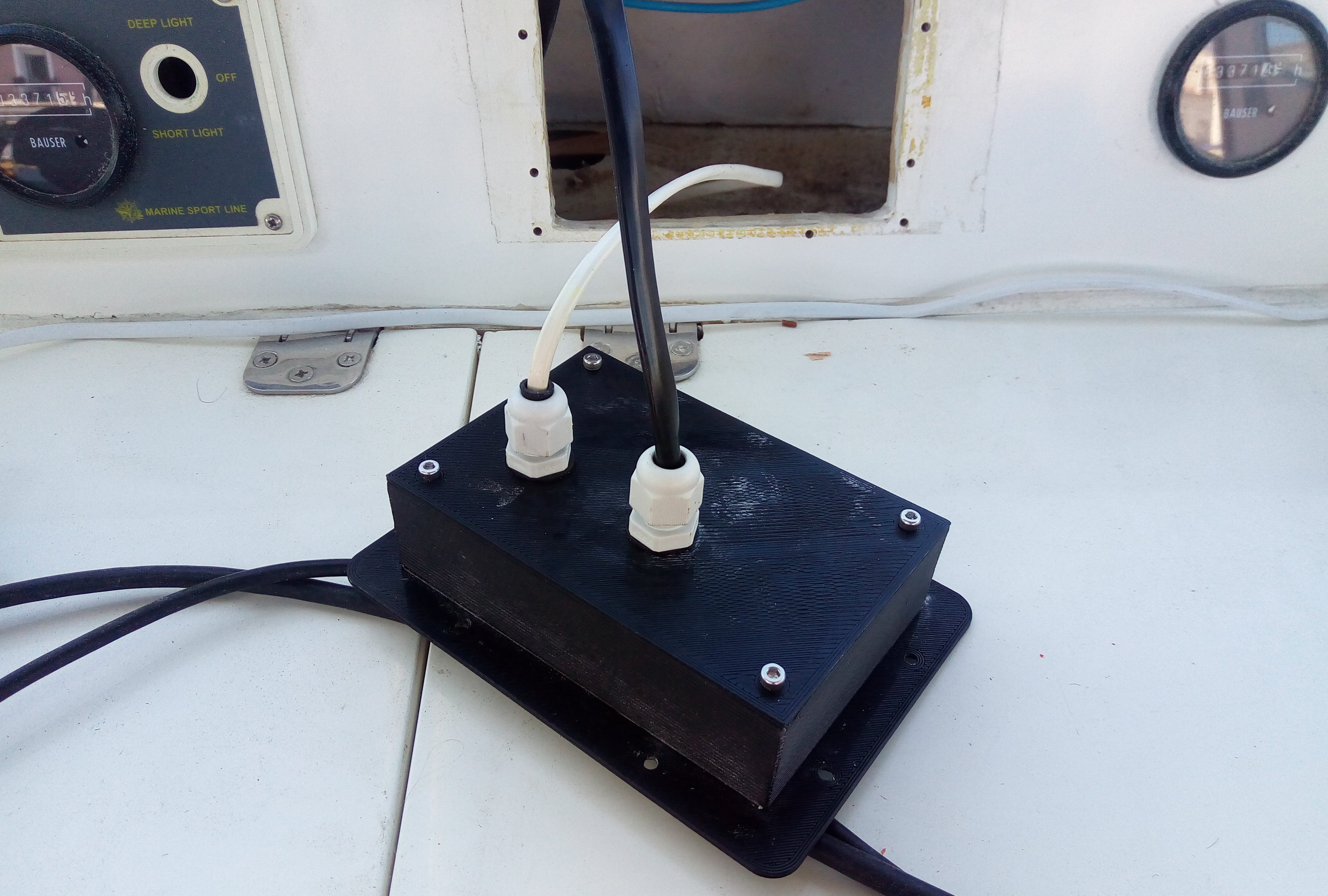
L’afficheur intégré au tableau de bord.

C’est beau!